
By Alexa, age 11
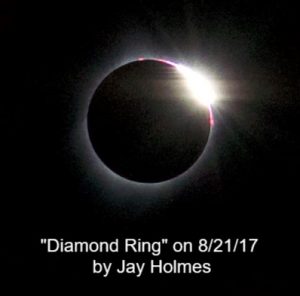
 This past August, I saw a total eclipse with my family on Snow King Mountain in Jackson Hole, Wyoming. We were given special eclipse glasses that blocked out almost all light, so we could only see the sun while wearing them. I looked at the sun a lot, about every 8 minutes. Finally, when the moon completely blocked the sun, we saw a sunset all around us. For 2 minutes it was completely dark and you could see Mercury, Venus, and the sun’s corona.
This past August, I saw a total eclipse with my family on Snow King Mountain in Jackson Hole, Wyoming. We were given special eclipse glasses that blocked out almost all light, so we could only see the sun while wearing them. I looked at the sun a lot, about every 8 minutes. Finally, when the moon completely blocked the sun, we saw a sunset all around us. For 2 minutes it was completely dark and you could see Mercury, Venus, and the sun’s corona.
The corona is a faint gaseous envelope around the sun. Normally the sun is too bright to see it and the only time scientists can study it is during a solar eclipse. It looked like light faint wispy rays coming off the sun, and extended about the diameter of the sun in each direction.
There are actually 3 kinds of solar eclipses: partial, annular and total. Eclipses occur on average 2 times per year, but there can be up to 5 in a single year, although that is very rare. Partial eclipses cover a portion of the sun, but not all of it. Annular eclipses happen when the moon covers the sun’s center, but the shadow is not big enough to cover the whole sun. This leaves a ring of fire (known as the “annulus”) around the edges. Total eclipses are where the whole sun is blocked by the moon and are by far the most amazing.
 Total eclipses happen because of an amazing coincidence. The sun is 400 times bigger than the moon, and also 400 times farther away. So from earth, the moon looks the same size as the sun, maybe even a little bigger. So a total solar eclipse happens when the sun and the moon are aligned perfectly.
Total eclipses happen because of an amazing coincidence. The sun is 400 times bigger than the moon, and also 400 times farther away. So from earth, the moon looks the same size as the sun, maybe even a little bigger. So a total solar eclipse happens when the sun and the moon are aligned perfectly.Unfortunately, the moon is actually moving away from the earth, so in around 500 million years, the moon will be too far away to completely cover the sun, meaning no more total eclipses! Thankfully that’s a long time from now. The next time there will be a total eclipse in the US will be in 2024, so if you missed this one, make sure you catch the next one!
